W naszych wspólnych rozmyślaniach i pracach niejednokrotnie już zajmowaliśmy się tematyką sposobów poruszania się. Braliśmy pod uwagę mechanizmy ruchu i zjawiska z nimi związane wśród przedstawicieli królestwa roślin Planta i zwierząt Animalia [1][2][3][4]. Do tej pory składało się jednak tak, że bardziej szczegółowej analizie poddaliśmy podstawy ruchu roślin, jako z reguły bardziej obce dla nas – sami należymy przecież do organizmów zwierzęcych. Dziś jednak chciałbym, aby Szanowny Czytelnik towarzyszył mi w prostych doświadczeniach na temat mięśni, które stanowią podstawowy „napęd” dla ciał zwierzęcych, zarówno jeśli chodzi o lokomocję, jak i inne ruchy.
Mięsień musculus jest narządem obdarzonym zdolnością do aktywnego skurczu. Stanowi jeden ze strukturalnych i funkcjonalnych elementów narządu ruchu jako całości. Co ważne, to właśnie mięśnie stanowią element czynny (napędowy) dla tego narządu. Mięśnie występują u wyższych bezkręgowców Invertebrata i u wszystkich kręgowców Vertebrata.
Tkanka budująca omawiane narządy jest zbudowana z silnie wyspecjalizowanych komórek. Męśnie są połączone w odpowiedni sposób ze szkieletem jako elementem nośnym (wewnętrznym – u kręgowców, zewnętrznym np. u stawonogów Arthropoda), a zmieniając swoje wymiary, powodują ruch poszczególnych jego elementów względem siebie. Źródłem energii dla mięśni są substancje chemiczne, głównie zmagazynowany w nich glikogen i glukoza dostarczona przez układ krwionośny. Kształt i budowa mięśnia ściśle zależy od funkcji, jaką pełni w organizmie [5].
Chociaż istnieje wiele metod klasyfikacji mięśni, zarówno na podstawie ich budowy, jak i funkcji lub kształtu, to najbardziej podstawowym sposobem podziału wydaje się ten, w którym wyróżniane są trzy główne grupy:
POLECAMY
- mięśnie gładkie,
- mięśnie szkieletowe (poprzecznie prążkowane),
- mięsień sercowy (poprzecznie prążkowany serca).
Pod względem budowy najprostszymi mięśniami w ciele człowieka są mięśnie gładkie odpowiedzialne za ruchy niezależne od naszej woli. Przykładem może być tutaj rozszerzanie źrenic i ruchy perystaltyczne jelit. Dużo bardziej złożona jest budowa mięśni poprzecznie prążkowanych, nie dziwi więc fakt, że są one znacznie późniejszym ewolucyjnie wynalazkiem natury. To właśnie one umożliwiają nam poruszanie się. Odrębnym rodzajem wykazującym szczególne cechy jest mięsień sercowy pompujący krew.
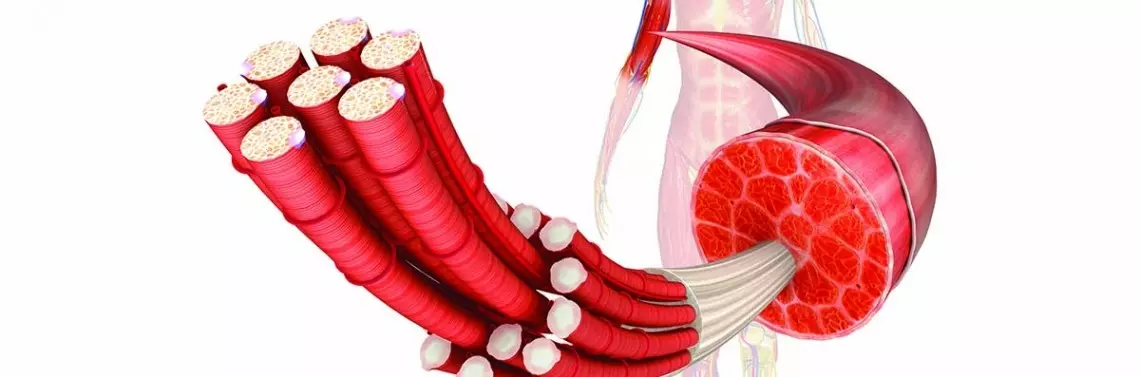
Mięsień poprzecznie prążkowany jest rodzajem tkanki mięśniowej, złożonej z silnie wydłużonych komórek o przekroju walcowatym. Jądra komórkowe są położone obwodowo, natomiast w centrum komórki występują liczne i rozciągające się na całą jej długość miofibryle zbudowane z ułożonych naprzemiennie filamentów cienkich (aktynowych) i filamentów grubych (miozynowych). To właśnie ta cecha budowy objawia się w obrazie mikroskopowym jako charakterystyczne prążkowanie. Zarówno aktyna, jak i miozyna są białkami motorycznymi – mają zdolność poruszania się względem siebie, niejako wsuwania się między siebie. Powoduje to zmniejszenie długości włókien mięśniowych, natomiast rozmiary samych filamentów pozostają niezmienione. Mięśnie poprzecznie prążkowane pracują w sposób zależny od woli, ale stosunkowo szybko ulegają zmęczeniu [6].
Mięśnie jako element napędowy zwróciły w drugiej połowie XX wieku uwagę naukowców zajmujących się biomimetyką.
Dziedzina ta, nazywana także bioniką, jest multidyscyplinarną nauką, badającą budowę i zasady działania organizmów. Celem jest tu adaptowanie tych zasad w technice i budowie urządzeń technicznych odwzorowujących organizmy lub – w praktyce – jedynie pewne ich elementy. Biomimetyka stara się poznawać na drodze eksperymentu naukowego procesy sterujące działaniem organizmów oraz wykorzystywać je w różnych obszarach działalności człowieka, m.in. w automatyce, elektronice, mechanice i budownictwie. Ciekawym przykładem jest tu opracowanie w 1941 roku przez George’a de Mestrala tkaniny Velcro, znanej dziś powszechnie dzięki wykorzystaniu jej w tzw. zapięciach na rzepy. Rozwiązanie to naśladuje sposób rozsiewania się nasion łopianu większego Arctium lappa, które w naturze przyczepiają się do sierści zwierząt i podróżują wraz z nimi, co jest interesującym przykładem zoochorii [7].
Dziś powszechnie wykorzystujemy urządzenia napędowe różnego rodzaju, np. silniki spalinowe w pojazdach, ale też elektryczne – szczególnie w sprzęcie miniaturowym. Urządzenia te najczęściej wytwarzają użyteczną pracę w postaci ruchu obrotowego wału silnika. Jest to mechanizm znacząco różny od formy generowania siły i pracy w organizmach żywych, czyli za pomocą mięśni. Z drugiej strony efektywność naturalnych mięśni, ich stosunkowo niewielka masa i objętość w porównaniu do generowanej siły wydają się bardzo kuszące z perspektywy techniki i przemysłu. Dlatego biomimetycy prowadzą intensywne badania w kierunku wytworzenia sztucznych mięśni, tj. struktur odwzorowujących przynajmniej pewne cechy mięśni jako układów napędowych. Jednym z interesujących przykładów jest sztuczny mięsień wykonany z nylonu, który został opisany w czasopiśmie „Science” [8]. Fotografia 1 przedstawia taki sztuczny mięsień wytworzony w mojej pracowni.




Sztuczny mięsień nylonowy jest elastyczny, pod wpływem obciążenia ulega rozciągnięciu (fot. 2A).
Wokół mięśnia zostało owinięte dodatkowe włókno z tworzywa sztucznego pokrytego metalicznym srebrem. Po podłączeniu do niego prądu elektrycznego całość ulega delikatnemu ogrzaniu, dzięki czemu dochodzi do skurczu mięśnia i uniesienia odważnika, czyli wytworzenia użytecznej pracy (fot. 2B). Działanie mięśnia jest odwracalne: po wyłączeniu przepływu prądu dochodzi do szybkiego schłodzenia mięśnia i jego rozkurczu.
Poza opisanym eksperymentalnym sztucznym mięśniem istnieją też inne technologie, także wykorzystywane dziś już na skalę przemysłową. Jedną z nich są sztuczne mięśnie (muskuły) pneumatyczne. Zasada ich działania i budowa są na tyle nieskomplikowane – przynajmniej w ogólnych zasadach – że możemy się pokusić o budowę prostego modelu takiego urządzenia napędowego.
Budowa i obserwacje
Aby zbudować działający model sztucznego mięśnia pneumatycznego, musimy zgromadzić następujące materiały:
- elastyczny wężyk, np. akwarystyczny (fot. 3A),
- rozciągliwą rurkę, np. fragment podłużnego balonu (fot. 3B),
- oplot na przewody (fot. 3C),
- opaski zaciskowe (fot. 4D).
Wymiary wszystkich elementów należy dobrać do swoich potrzeb.
Głębszego omówienia wymaga oplot (fot. 3C) wykorzystywany do ochrony i organizacji różnego rodzaju przewodów, np. w komputerach. Jest on zbudowany z krzyżujących się włókien wykonanych z tworzywa sztucznego (fot. 4).
Interesującą i ważną z punktu widzenia konstrukcji sztucznego mięśnia cechą takiego oplotu jest fakt, że jest on strukturą dynamiczną: tworzące go włókna przecinają się pod różnym kątem w zależności od warunków. Kiedy ściskamy oplot, to włókna przecinają się pod kątem zbliżonym do prostego (fot. 4B), natomiast po rozciągnięciu pod zdecydowanie innymi kątami (fot. 4A). Pociąga to za sobą zmianę wymiarów: podczas zmniejszania wymiaru podłużnego, wymiar poprzeczny oplotu powiększa się i vice versa (fot. 5).
Wszystkie elementy należy zestawić według schematu zamieszczonego na rys. 1. Elastyczną rurkę trzeba umieścić w oplocie, który musi zostać przycięty do tej samej długości. Do rurki wkładamy następnie koniec elastycznego wężyka, po czym wszystko razem ściskamy opaskami (można zastosować też wielokrotne owinięcie mocną nicią). Połączenie musi być szczelne, tak aby możliwe było nadmuchanie przez wężyk elastycznej rurki wewnątrz oplotu. W ten sposób model sztucznego mięśnia jest gotowy.
Zbudowany w opisany sposób sztuczny mięsień jest zbliżony w swojej budowie do mięśnia szkieletowego, tj. posiada elementy analogiczne do brzuśca i ścięgien (fot. 6).
Kiedy wewnątrz mięśnia panuje ciśnienie równe ciśnieniu atmosferycznemu, to mięsień jest w fazie rozkurczu (fot. 6A). Natomiast po zwiększeniu ciśnienia, np. poprzez napompowanie strzykawką, dochodzi do skurczu – mięsień się rozszerza, a jednocześnie wyraźnie skraca (fot. 6B).
Jeśli chodzi o wielkość skurczu, to aby ją oszacować, musimy zmierzyć mięsień w obu stanach, co zilustrowałem na fot. 7.




Jak widać, podczas rozkurczu długość mięśnia wynosi 80 mm, zaś w czasie skurczu 61 mm. Długość struktury zmniejsza się więc o około 25%, co jest wynikiem porównywalnym do niektórych mięśni naturalnych.
Jeśli chodzi o możliwości wykonania pracy przez model, to są one zadziwiająco duże. Opisany model o długości kilku centymetrów podnosi z łatwością ciężar o masie 400 g (fot. 8). W ekstremalnym przypadku udało się dokonać podniesienia odważnika o masie 2000 g, ale wymagało to zastosowania większego ciśnienia.
Tego rodzaju sztuczne mięśnie można połączyć z modelami szkieletowymi. Możliwe jest też wytwarzanie mięśni o więcej niż tylko jednym brzuścu.


Wyjaśnienie
Jak więc widzimy, budowa działającego modelu pneumatycznego sztucznego mięśnia nie jest trudna. Co ciekawe, podobne siłowniki są stosowane od kilku dekad coraz powszechniej w przemyśle – nie jest to więc jedynie ciekawostka.
Masa mięśnia pneumatycznego jest niewielka, co jest związane z faktem, że jego głównym elementem jest elastyczny przewód. Logarytmiczna zależność ciśnienia oraz siły generowanej przez taki element jest zbliżona do zależności występującej w rzeczywistych układach biologicznych, dzięki czemu łatwiej za jego pomocą odwzorować działanie biologicznych mięśni np. w protezach. Także elastyczność jest w obu przypadkach analogiczna (fot. 9). Dodatkowo dzięki ściśliwości gazu mięśnie pneumatyczne umożliwiają częściowe zamortyzowanie nadmiaru siły, a więc jednocześnie bardziej precyzyjną pracę. Byłyby więc odpowiednie do napędzania aktywnych protez kończyn ludzkich. Niestety, takie urządzenia mają też pewne wady – najważniejszą z nich jest kłopotliwe sterowanie.
Mam nadzieję, że udało mi się zainteresować Szanownego Czytelnika tą interesującą dziedziną wiedzy, jaką jest biomimetyka.
Literatura:
- Ples M., Iglica pospolita – roślinna katapulta i ruchliwe nasiona, „Biologia w Szkole”, 5 (2020), Forum Media Polska Sp. z o.o., s. 54–57.
- Ples M., Roślinny bokser? Szybkie ruchy pręcików berberysu, „Biologia w Szkole”, 3 (2020), Forum Media Polska Sp. z o.o., s. 81–85.
- Ples M., Mały gigant – rzecz o karaczanie madagaskarskim, „Biologia w Szkole”, 1 (2017), Forum Media Polska Sp. z o.o., s. 56–63.
- Ples M., W labiryncie – decyzje równonoga, „Biologia w Szkole”, 4 (2019), Forum Media Polska Sp. z o.o., str. 56–62.
- Bochenek A., Reicher M., Anatomia Człowieka, PZWL Wydawnictwo Lekarskie, Warszawa, 2010.
- Sawicki W., Histologia, PZWL Wydawnictwo Lekarskie, Warszawa 2009.
- McSweeney T. J., Raha S., Better to Light One Candle: The Christophers’ Three Minutes a Day: Millennial Edition, Continuum International Publishing Group, 1999, s. 55.
- Haines C. S., Lima M. D., Li N., et al, Artificial Muscles from Fishing Line and Sewing Thread, Science, 2014, 343(6173), s. 868–872.
Wszystkie fotografie i rysunki zostały wykonane przez autora.